Robot origami in 3D che si muovono senza motori né ingranaggi
Un team di ricercatori USA ha stampato in 3D un robot origami flessibile e riprogrammabile che si muove senza motori o controlli pneumatici esterni.
Introduzione
Grazie alla loro capacità di cambiare forma e manipolare oggetti delicati, i soft robot (robot realizzati con materiali morbidi) hanno la possibilità di poter essere utilizzati come impianti medici, somministrare farmaci all'interno del corpo e aiutare gli esseri umani ad esplorare ambienti difficili da raggiungere. Ma queste macchine morbide sono spesso limitate dall’utilizzo di parti meccaniche rigide o da sistemi esterni che li aiutano rispettivamente a muoversi oppure forniscono energia.
Recentemente, un gruppo di ingegneri all’università di Princeton ha progettato e costruito un prototipo di robot ibrido “morbido-rigido” in grado di muoversi e spostarsi senza bisogno di motori o controlli pneumatici esterni. Per farlo, il team ha combinato un polimero stampabile, chiamato elastomero a cristalli liquidi, con componenti elettronici flessibili e tecniche di piegatura dei materiali basate sull'arte dell'origami.
In un recente articolo, pubblicato il 21 marzo scorso sulla rivista Advanced Functional Materials, il team di ricercatori USA guidato dai professori Emily Davidson e Glaucio Paulino è riuscito a realizzare, attraverso una stampante in 3D, un robot morbido riconfigurabile capace di muoversi ripetutamente senza cali significativi delle prestazioni anche dopo 1500 cicli di funzionamento.
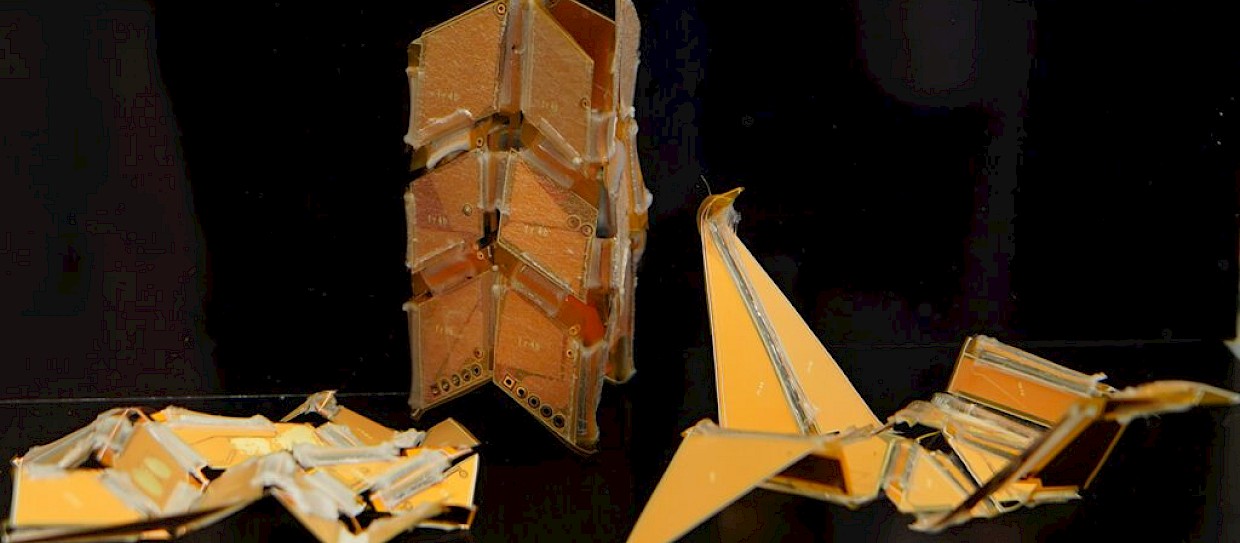
I ricercatori hanno pertanto costruito, a scopo dimostrativo, un robot morbido a forma di gru (una classica figura origami) che sbatte le ali quando alimentato elettricamente. La gru si muove senza motore, il controllo del battito delle ali è reso possibile grazie al riscaldamento mirato di alcune zone del polimero.
 Immagine - I ricercatori hanno usato l'origami per progettare la struttura del robot. Credits: Università di Princeton.
Immagine - I ricercatori hanno usato l'origami per progettare la struttura del robot. Credits: Università di Princeton.
Gli esperimenti hanno anche dimostrato che il robot morbido può muoversi con precisione e assumere forme diverse, attraverso sequenze programmabili in tempo reale, una caratteristica fondamentale per applicazioni pratiche future. Il robot alla fine di ogni ciclo di lavoro è in grado di ritornare sempre alla sua forma originaria senza usura o distorsione dei suoi elementi.
La costruzione del robot inizia con una stampante 3D e uno speciale polimero
Tutto il processo per realizzare il robot origami inizia con un polimero fuso che viene stampato in determinate zone con particolari motivi geometrici usando una stampante 3D configurata e personalizzata appositamente dai ricercatori.
Nonostante la sua natura flessibile, il polimero che i ricercatori usano è un elastomero a cristalli liquidi, ciò significa che le sue molecole interne hanno comunque una struttura ordinata.
Il gruppo coordinato dalla Prof.ssa Davidson è esperto nel controllare sia la struttura degli elastomeri a cristalli liquidi tramite la progettazione molecolare sia nel controllare la nanostruttura (in questo caso, l'orientamento) dei polimeri tramite la stampa 3D, tali fattori sono entrambi fondamentali per la buona riuscita di questo progetto.
I ricercatori hanno programmato la stampante in modo da variare l'orientamento interno della struttura molecolare del polimero durante il processo di stampa. Ognuna delle zone stampate con i motivi geometrici presenta un allineamento molecolare coerente.
Impilando queste zone e collegandole in modi diversi i ricercatori sono stati in grado di creare delle cerniere nel materiale che sono in grado di piegarsi in modi prestabiliti (programmati in anticipo) quando il materiale viene riscaldato.
Il robot origami è nato da un progetto di una tesi di laurea
Lo sviluppo del nuovo sistema robotico iniziò come progetto di tesi di laurea di David Bershadsky all’università di Princeton. Bershadsky, ora iscritto alla scuola di specializzazione presso l'Università del Texas (USA), ha conseguito la laurea in ingegneria elettrica nel 2024 a Princeton.
Il Dott. Bershadsky ha dichiarato di aver maturato un interesse per la robotica durante un progetto di robotica alle scuole superiori, riuscì infatti a sviluppare sciami robot che impiegavano singole unità robotiche che cambiavano dimensione. Bershadsky appena arrivato a Princeton era pertanto interessato a portare avanti quel lavoro.
«Stavo cercando un modo per creare facilmente e ripetutamente singole celle che potessero trasformarsi in base al volume» scrive Bershadsky.
Bershadsky riteneva che gli elastomeri a cristalli liquidi potessero servire per trasmettere il movimento per creare tale tipo di sistema robotico e così si rivolse alla Prof.ssa Davidson, esperta di tali materiali, per avere suggerimenti su come procedere. Davidson ritenne che l’idea fosse intrigante.
«La prof.ssa Davidson mi disse che avrei dovuto seguire il corso di ingegneria origami del Prof. Paulino per avere una formazione più strutturata», prosegue Bershadsky. Uno degli assistenti di tale corso era il Dott. Tuo Zhao, ricercatore post-doc nel laboratorio del Prof. Paulino che è uno dei coautori dell'articolo.
I ricercatori hanno progettato tecnologia per la produzione.
Secondo Bershadsky il lavoro è stato principalmente un’«integrazione della scienza dei materiali con la robotica con un focus sulla realizzazione del prototipo dal punto di vista della possibilità di fabbricarne i pezzi».
«Penso che il grande contributo che abbiamo fornito sia stato quello di mostrare l’integrazione di un sistema complesso in cui abbiamo il controllo localizzato del riscaldamento» prosegue il ricercatore. «Siamo in grado di controllare l’attivazione del robot a seconda delle zone che andiamo a riscaldare».
Oltre a dimostrare la fattibilità del sistema robotico, Bershadsky ha realizzato uno strumento software che i progettisti possono usare per creare i propri robot. Lo strumento è disponibile sul canale github del laboratorio ed è incluso nel dataset dell’articolo scientifico.
Qual è la parte più difficile del lavoro?
«Onestamente, l’integrazione dei sistemi rappresenta la parte più difficile» sostiene Bershadsky. «L’intero progetto è l’integrazione di una miriade di tecnologie diverse», conclude il ricercatore.
Riferimenti
Lo studio “Digital Actuation Control of Soft Robotic Origami With Self-Folding Liquid Crystal Elastomer Hinges” è stato pubblicato sulla rivista Advanced Functional Materials
https://advanced.onlinelibrary.wiley.com/doi/10.1002/adfm.202525150


