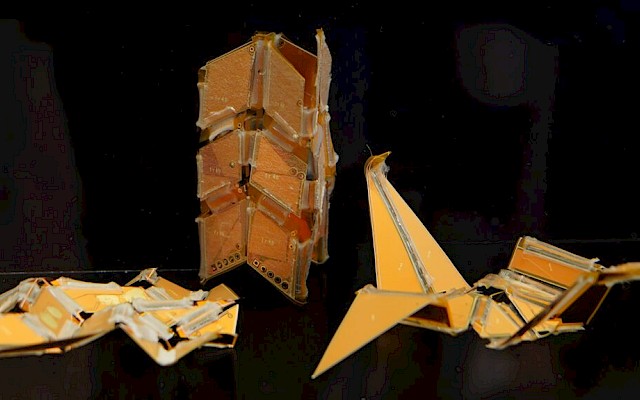
Home/ Robotica Robotica RL Redazione LSWN 20 luglio 2020 · 1 min di lettura Condividi Facebook X Telegram Continua a leggere Robotica → Robotica Robot origami in 3D che si muovono senza motori né ingranaggi 15 aprile 2026 · 5 min Robotica World renowned robot safety expert joins Universal Robots 9 settembre 2016 · 1 min Robotica Durus, il robot che cammina come una persona 13 luglio 2016 · 4 min